






Jefa Autopilot Drives
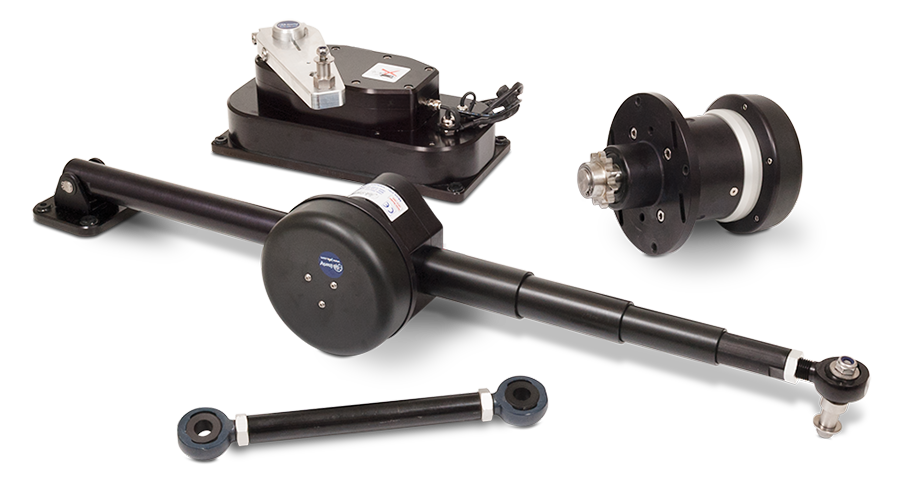
The Jefa electro-mechanical drives are strong, compact, and much more efficient than any other electro-mechanical autopilot drive unit on the market. Suitable for sailing vessels from 20' up to 70' in length, the Jefa drive units use a flat wound electric motor that is not a standard industrial motor, but specifically designed and produced for this application. This provides multiple advantages over standard industrial motors. Jefa has also developed a unique and patented engagement clutch. The solution is based on two electrically operated spring loaded clutch pins that engage and disengage when the autopilot is powered and switched off. This allows for less friction when under manual control of the helm, a very long clutch life as it will not wear over time like traditional friction plates, and a very low current draw. Due to their use of the flat wound motor and pin clutch system, the drive units are one of the most strong and compact autopilot drive units available. Jefa's mechanical autopilot drive units are compatible with all major autopilot brands, like Raymarine, Simrad, Garmin, NKE, Furuno and B&G. Jefa Marine has been making reliable electro-mechanical autopilot drives for over ten years. Please feel free to contact us if you have any further questions about the available drive units.

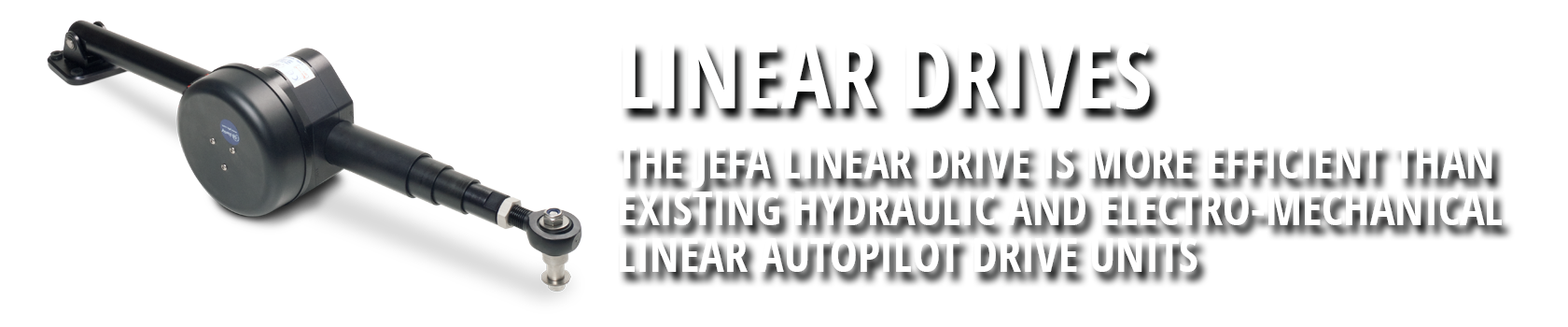
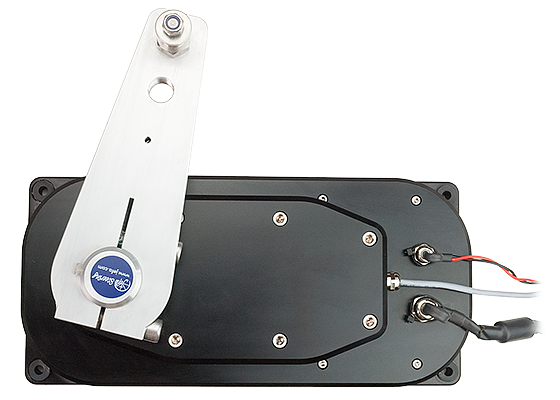
Linear Drives
The Jefa Linear Drive is a strong and compact autopilot drive and much more efficient than existing hydraulic and electro-mechanical linear autopilot drive units.
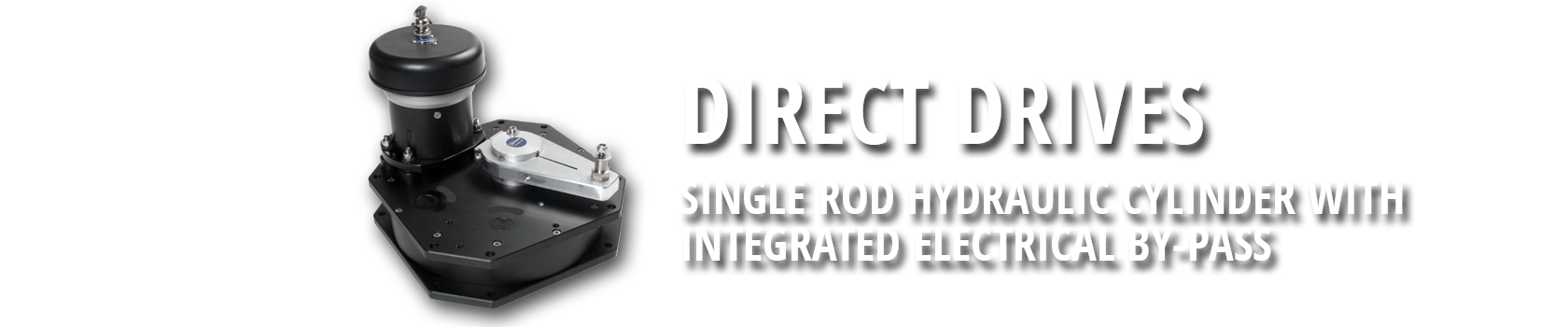
Direct Drives
The Jefa Direct Drive is one of the the strongest compact autopilot drives in the world. The combination of the specially designed electric motor with the ultra efficient 3 stage planetary gearbox results in an extremely efficient drive unit to keep the battery charging time to the minimum.
Transmission Drives
The Jefa Transmission Drive is one of the most compact autopilot drives in the world, and is designed for 24 hours per day continuous operation with a total weight of only 13lbs.


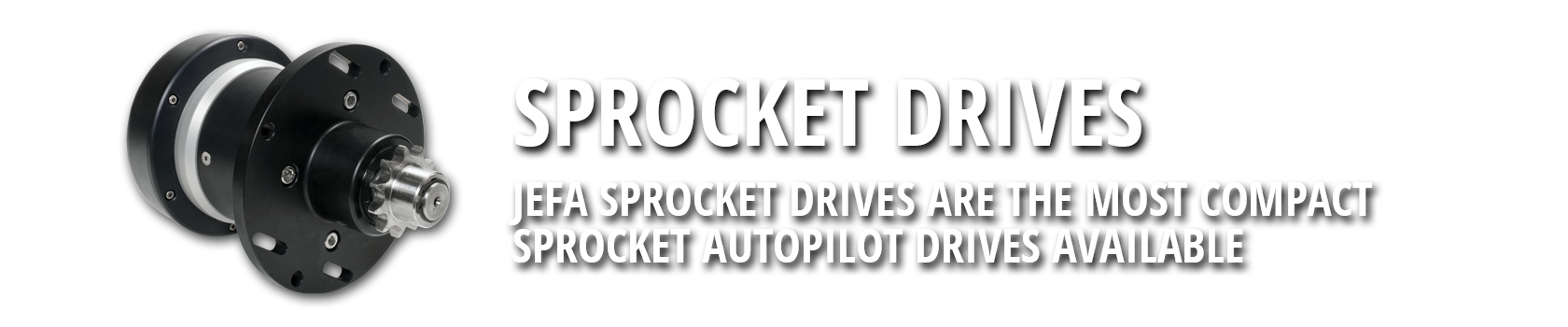
Sprocket Drives
The Jefa Sprocket Drive is the most compact sprocket autopilot drive available on the market. Can be used on boats from 35’ to 65’ (or with a rudder torque up to 2,887 ft/lbs) equipped with a cable or rod steering system.
Tiller Levers
Jefa Tiller Levers are made from high strength aluminium, and are available in three boss sizes depending on the rudder stock diameter.

Jefa Autopliot Drive FAQ's
If you can't find an answer to your question here please feel free to contact us.
You need more parts than one would think to make a good functioning autopilot system.
The above schematic indicates the minimal parts needed for a proper working autopilot system. The autopilot junction box (also called course computer) is the core in the system:
- The autopilot control head is mostly located near the helmsman so he can control the on-standby button and enter the course. Sometimes there is a digital connection to a plotter for receiving waypoints.
- The fluxgate compass informs the autopilot on the course of the boat and should be positioned near the centre of mass of the boat, so the movement of the compass is as small as possible. Improved fluxgate compasses can be purchased nowadays with integrated movement and rotations sensors for a more stable output course. On steel boats, these rate sensing fluxgate compasses should always be used as the compass can't be in the hull, but should be above the steel in the mast.
- The rudder feedback unit is connected to the rudder shaft via a lever, so the autopilot can track the rudder angle. In some cases the rudder feedback unit can be connected to the drive unit for ease of installation or even integrated into the drive unit (linear drive). Some autopilot producers try to safe money and deliver autopilots without rudder feedback unit. We advise not to use these autopilots as not knowing where the rudder is located can be very dangerous as the drive can be sent through the end point and cause damage to the hull and drive unit.
- The drive unit is the only part in the system delivered by JEFA steering. many different types of drive units are available depending on the used steering system and boat length.
No, it really does matter which autopilot you choose as there are big differences! There are many important features in autopilot electronics which will contribute in a good working autopilot setup.
- Important is to have a good rudder feedback unit, so the autopilot knows the position and speed of the rudder and drive unit.
- A modern fluxgate compass, preferably with movement and rotation sensors (rate sensing) to achieve a correct magnetic course, even on rough seas.
- When the autopilot is adaptive (self learning), the course computer will learn from its mistakes and tries to use the best settings possible in various circumstances.
- Speed control (see explanation below)
- Dynamic braking (see explanation below)
Full speed control and dynamic braking are the two most important features of a modern autopilot course computer.
Speed Control: Some autopilots control the autopilot drive unit with an on-off signal. This can result in a bumpy autopilot steering and high peak forces in the system as all movements are abrupt (no soft start and soft stop). The autopilot has trouble to steer the boat as no real subtle movements are possible and the pilot would often overshoot the required rudder position. It’s like driving a car through a city with only full throttle or full brake. You will get there, but it is a bumpy drive. Often these on-off pilots are developed as power boat autopilot and meant to drive a hydraulic cylinder (which is nearly always controlled with an on-off signal).
More modern autopilots are able to control the speed of the autopilot drive unit from 0 to 100% without any steps via so called pulse width modulation. To be able to vary the power sent to the drive unit, they don't sent a continuous signal, but pulses, and by adjusting the width (duration) of the pulse from zero to hundred percent they can accurately control the speed of the drive unit. With this pulse width modulation the autopilot can make sure the start is not with a bang (full 100% power at once) but a so called "soft start" is performed. The same with the stop of the movement. This will be done with a soft stop. As the autopilot is continuously starting and stopping, this is very important. Autopilots without speed control often start "hunting" at low boat speeds. Hunting is an oscillating movement around the mid position where the steering wheel continuously swings around the mid position. It can only be stopped by grabbing the wheel by hand or turning the autopilot off. As the autopilot can't control the speed properly it corrects the course, but continuously overshoots the required position. It immediately responds by reversing the power and powering the system again, but then the same overshoots happens. This results in a wheel swing around the mid position.
Dynamic Braking: "Why do I need any braking? I want to power the rudder, not brake!". Modern sailing yachts require rudder and steering systems and autopilot drives that are very light running so the maximum amount of feedback from the rudder is transmitted to the helmsman for the most optimal "tiller feel". On top of that the tendency is to use bigger and bigger steering wheels with larger moments of inertia (flywheel effect) or twin wheel systems that also double the wheel inertia.
As no friction in the rudder and steering system is allowed any more and all parts run on ball or roller bearings, there is no damping/braking of the system any more. This means when you add energy to the system by the autopilot drive, you should also have a way to get the energy out. So in practice when the autopilot has to make a quick correction, the system is speeded up and a few degrees before reaching the final position of the rudder, the power is taken off. But due to the inertia of the wheel and the fact that there is no damping, the rudder overshoots the targeted end position and the autopilot starts to correct this and reverses the power and this goes on and on and on. This is called “hunting of the autopilot” an oscillation around the amidships position. This causes high stresses in the construction, could cause damage to the steering and rudder system, but above all will empty your batteries very quickly! Modern autopilots have a feature called dynamic braking to prevent this. It’s a very simple modification of the end transistors of the autopilot. The feature is to shortcut the wires going to the motor/drive unit as soon as there is no power given from the autopilot. As the drive unit will act as a dynamo when back driven (the fraction of a second before reaching the end position) it can really brake the system very hard. This feature can be tested very well on board. For this you need a battery and one of our autopilot drives. Put voltage on the clutch (small wires) and try to back drive it (move output lever by hand or turning the steering wheel). You will see that it is quite easy to do. Now take both motor wires and connect them to each other (shortcut the motor) and you will see that it is nearly impossible to back-drive the unit.
This holding power is the second advantage of a dynamic braking feature. While sailing on autopilot, the rudder needs a constant cut angle to the water flow to keep the ship on course. This requires a constant force of the autopilot drive driving the rudder. On systems without dynamic braking, the autopilot commands the drive unit to a certain rudder angle and takes the power off. But within seconds, the drive unit is pushed back by the rudder forces to the neutral position. The autopilot will have to drive the rudder to the required rudder angle again and when it is reached, the rudder slowly turns back neutral again. This not only gives a non constant course, but also uses a lot of power, causes high wear in the drive unit and heats up the drive unit to immense temperatures.
With dynamic braking, the autopilot can "grab and hold" the rudder fixed when it is a certain position and hold it without any movement and without using any energy. As shown in these points, speed control and dynamic braking are very important and make or brake an autopilot system.
No, it really does matter which autopilot drive unit you choose as there are big differences! There are big differences between various autopilot drive units. The biggest differences can be found between electro-mechanical and hydraulic drive units. Electro-mechanical JEFA drive units are much better suited for sailboats than hydraulic drive units:
Drag / Friction: Much less drag while not in use. Especially on small boats it’s very important to have the minimum force required to back drive the autopilot. Some of these boats use a tiller and the others a very sensible mechanical steering system. Lots of money is invested nowadays by the yards in roller bearings for the rudder shaft to achieve the maximum in feedback and the minimum in drag. Adding a hydraulic cylinder to the rudder/steering system is like adding a big damper. Hydraulic autopilot rams tend to back drive very difficultly as the cylinder has high pressure seals that brake the piston heavily and the oil has to be pressed from one side to the other through a small bypass valve causing a high friction.
Efficiency: Much higher efficiency. On a power boat (where hydraulic autopilots were designed for) the autopilot efficiency is not important as you have a continuous source of energy. On sailboats you don’t have this source. Autopilots are continuous power users as often they work round the clock. In an electro-mechanical drive you have one energy transformation. You have electrical energy and it's transformed to mechanical energy. In a hydraulic drive you have three energy transformations. First you have electrical energy and you transform it to mechanical energy in the electro motor. The electro motor drives a hydraulic pump and transforms the energy into hydraulic energy. The hydraulic energy is transformed to mechanical energy in the cylinder. Every energy transformation has it’s specific efficiency and loss. Due to three energy transformations the losses in the hydraulic unit are much bigger than in the electro mechanical unit. Even when you would have 75% efficiency per transformation (which is not realistic) you get 0.75*0.75*0.75=0.42 = 42% efficiency.
Another big difference between the hydraulic and electro-mechanical unit is the type of electro motor used. The hydraulic unit uses a standard brushed DC electro motor (small diameter, long shape) which are cheap but have a limited efficiency (45-55% efficiency). The electro-mechanical unit uses a flat wound (pancake) motor with more than 80-90 % efficiency. This results in a total efficiency of hydraulic units to be between 25 and 35% and electro-mechanical units between 70 and 80%. In practice this will mean you need up to 3 times more power to get the same output out of the hydraulic unit. The differences are even bigger on larger (>55 foot) boats. You can't use a reversible type hydraulic drive any more (not available as the motor currents would be too big to control). The hydraulic option on bigger boats is a "continuously running power pack". This power pack keeps a hydraulic reservoir continuously under pressure and the autopilot uses solenoid valves to pressurise each side of the cylinder. Due to the continuous running power pack motors, this system consumes even more electrical power and could use up to 10 times more energy than an electro mechanical solution.
Speed Control: Much better speed control. Modern autopilots use pulse width modulation to vary the power sent to the drive unit from zero to hundred percent. This way they can accurately control the speed of the drive unit. JEFA electro-mechanical drive units use flat wound (pancake) electric motors, which have a thin but very large diameter rotor, have a very high start torque (due to the large rotor diameter) and a very small inertia as there is no iron in the rotor, just windings. Due to these features, they follow exactly the speed curve sent by the autopilot.
Normal standard brushed DC electro motors, used in hydraulic drive units, are not made to start and stop and reverse all the times. They are made for continuous and constant rpm rotation. They have a low starting torque (due to the small diameter rotor) and a high inertia (due to the heavy rotor). The result of this is a cut off of the ideal autopilot speed curve below 50-60% speed as these motors tend to need at least 50% of the maximum voltage to even start rotating. Flat wound motors start rotating at 5-10% of the maximum voltage.
The result of this all is a near binary (on-off) reaction of the hydraulic unit to the speed control of the autopilot and a smooth full speed control with soft start and soft stop by the electro-mechanical unit with a fraction of the power consumption.
No, we don't approve a system without a rudder feedback unit.
The rudder feedback unit is connected to the rudder shaft via a lever, so the autopilot can track the rudder angle. Some autopilot producers try to safe money and deliver autopilots without rudder feedback unit. We advise not to use these autopilots as not knowing where the rudder is located can be very dangerous as the drive can be sent through the end point and cause damage to the hull and drive unit. It's also very handy to see the actual rudder angle on the display as feedback info for the helmsman. Failing to install a rudder feedback unit will invalid the Jefa warranty terms as serious damage will happen at a point in time.